




























.png)









TOPODRONE POST PROCESSING 1.5.2.1 UPDATE RELEASED

Contents:
Main new features:
- Improved data visualisation speed on the map
- Point cloud conversion between coordinate systems
- Processing data from DJI Mavic 3 Multispectral
- Processing log (logs.txt)
- Optimisation of the LiDAR Cloud Generation module
The TOPODRONE team is pleased to announce the release of a new version of the software — TOPODRONE POST PROCESSING 1.5.2.1. The update includes key improvements aimed at increasing performance, convenience, and expanding functionality.
Main new features:
Improved data visualisation speed on the map
In TPP 1.5.2.1, the display of trajectories, photographs, and time stamps in all programme modules has been significantly accelerated. Visualisation is now almost instantaneous — even when processing large volumes of data.

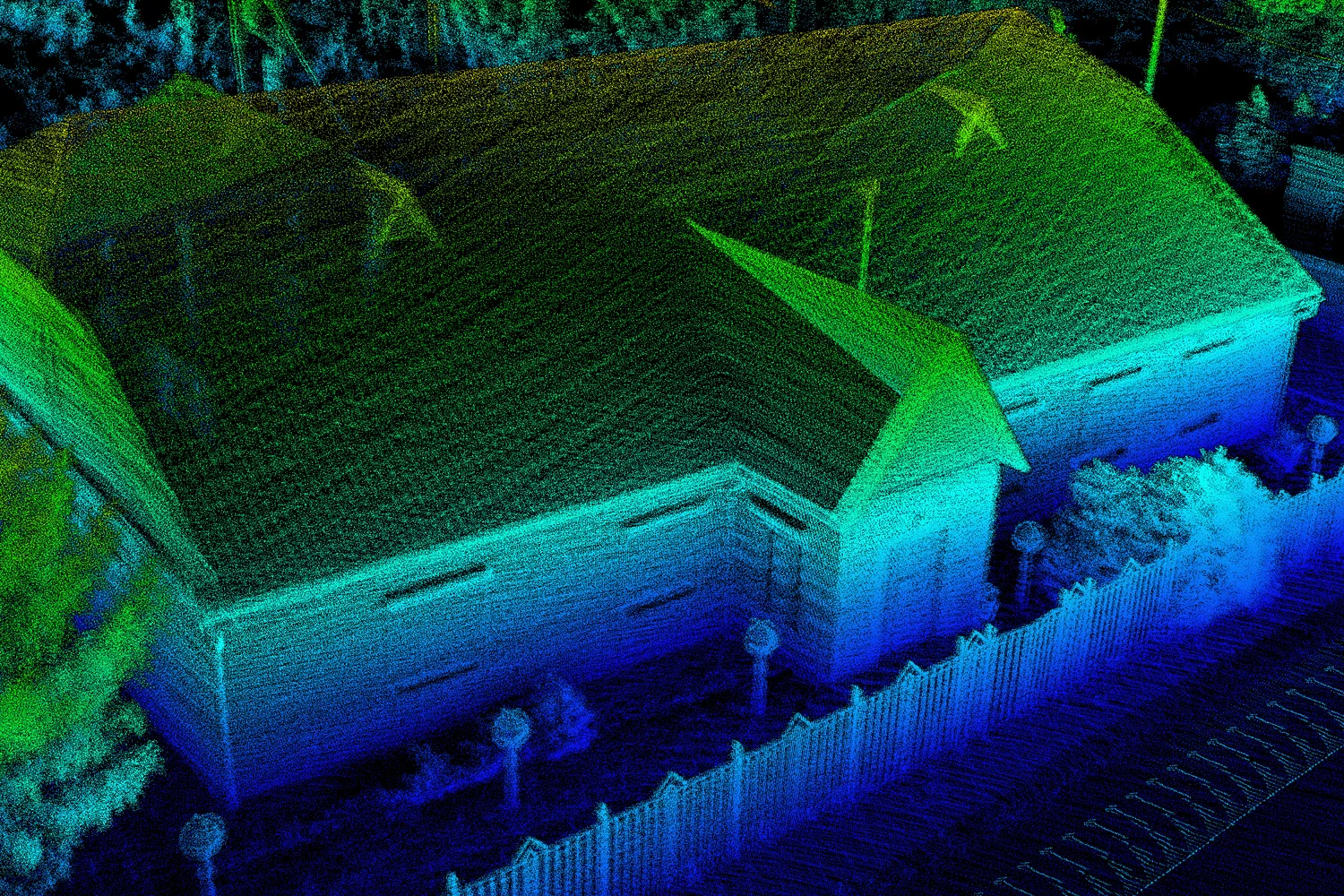

Images 1-3. 3D reconstruction of mobile laser scanning point clouds
Benefits:
- Reliable performance with large-scale and high-density projects.
- Rapid verification and analysis of long GNSS/PPK routes, large aerial photography datasets, and multi-task projects.
- Ability to quickly compare data and make decisions, even with limited time.
Video 1. TOPODRONE Post Processing 1.5.2.1 interface – data visualisation
Point cloud conversion between coordinate systems
Added the ability to convert point clouds in .LAS / .LAZ formats between different coordinate systems based on parameters from .prj files and calibrations.
Benefits:
- Support for any coordinate systems and compatibility with external GIS/CAD: WGS84, UTM, and others.
- Correct alignment of point clouds with topographic surveys, cadastral data, and design geometry.
- Built-in tool — no need for external software or manual processing.
Key features:
- Automated process: the user selects the source cloud and specifies its coordinate system from the list, then selects the target coordinate system — the programme automatically recalculates coordinates based on .prj file data and calibrations, without manual parameter entry.
- Accuracy in compliance with technical specifications, ISO, and industry standards, without distortions or shifts.
- Capability to work with large projects — tested on sites up to several tens of kilometres in length (practical limitation determined by the coverage radius of a single base station).
- Minimisation of errors and faster integration — no intermediate steps or conversions via third-party services.
Video 2. TOPODRONE Post Processing 1.5.2.1 interface – point cloud conversion between coordinate systems
This update is especially relevant for designers, surveyors, and engineers working with linear and infrastructure assets (power transmission lines, roads, utility networks), where precise alignment of point clouds to the project coordinate system is critical.
Processing data from DJI Mavic 3 Multispectral
In TPP 1.5.2.1, support has been implemented for data from the DJI Mavic 3 Multispectral. Previously, only a catalogue of RGB image centres was created upon data import. Now, catalogues are generated for all image types contained in the imported directory.
Benefits:
- Ability to work with the complete set of multispectral images without manual sorting;
- Automatic catalogue generation simplifies data preparation for analysis and processing;
- Reduced risk of missing or losing data when working with different image types.

Image 4. DJI Mavic 3 Multispectral
Video 3. TOPODRONE Post Processing 1.5.2.1 interface – working with DJI Mavic 3 Multispectral data directories
Processing log (logs.txt)
TOPODRONE Post Processing now includes a detailed processing log that automatically records the full set of flight and post-processing parameters in a logs.txt file.
Recorded data:
- Activation time of rover and base station.
- Number and types of satellites used (GLONASS, GPS, Galileo, BeiDou, etc.).
- Signal frequencies and measurement types used.
- Data recording frequency.
- Information on coordinate system and geoid model.
- Equipment parameters: drone model, antenna offsets, antenna height.
- Statistics on the number of images, events, and observation epochs.
- Base station parameters (including coordinates and operating time).
- Processing settings (mask angle, post-processing mode, etc.).
Benefits:
- Full control over processing parameters — allowing detailed analysis of each stage
- Transparency and reproducibility — all key settings and results are recorded
- Increased reliability and quality — detailed statistics facilitate monitoring, data validation, and error detection
25/07/2025 18:30:15 Dataset №1: TPP Version: 1.5.2.1(27.07.2025) License key: 1348DF06-8777-48CF-A6D8-E4239CA973A0 #Images folder: E:\Datasets\Photogrammetry\TOPODRONE P61 21 mm \Photo RGB GNSS file: E:\Datasets\Photogrammetry\TOPODRONE P61 21 mm \Photo RGB\2023-07-05_11-01-12.ubx Start time: 05/07/2023 11:01:31 UTC End time: 05/07/2023 11:26:52 UTC Sampling Rate: 0.1 s (≈ 10 Hz) Observed measurement types: G (GPS): C1C D1C L1C S1C C2X D2X L2X S2X R (GLONASS): C1C D1C L1C S1C C2C D2C L2C S2C E (Galileo): C1X D1X L1X S1X C7X D7X L7X S7X C (BeiDou): C2I D2I L2I S2I C7I D7I L7I S7I Number of satellites observed: Min: 29 Average: 40.6 Max: 42 Epochs : 15208 of 15208 expected ( 100.00% complete ) Number of photos: 304 Number of events: 304 Drone model: TOPODRONE P61+PPK+DJI Matrice 300 Forward/backward offset: 0.074 Left/Right offset: 0.022 Antenna height: 0.362 #Coordinate system: World-WGS 84-UTM-zone 35N (m) EPSG 32635 Geoid model: Ellipsoid WGS-84 #Base station: E:\Datasets\Photogrammetry\TOPODRONE P61 21 mm \ReachGeoGor_raw_20230705105548.obs Start time: 05/07/2023 10:56:06 UTC End time: 05/07/2023 12:52:11 UTC Sampling Rate: 1 s (≈ 1 Hz) Observed measurement types: G (GPS): C1C D1C L1C S1C C2X D2X L2X S2X R (GLONASS): C1C D1C L1C S1C C2C D2C L2C S2C E (Galileo): C1X D1X L1X S1X C7X D7X L7X S7X S (SBAS): C1C D1C L1C S1C C (BeiDou): C2I D2I L2I S2I C7I D7I L7I S7I Number of satellites observed: Min: 40 Average: 42.6 Max: 46 Epochs : 6966 of 6966 expected ( 100.00% complete ) North: 6045511.967295254 East: 701922.4288487637 Height: 228.738 Antenna height: 1.834 #Settings Satellites: GPS GLONASS GALILEO BEIDOU Mask angle: 15 Post Processing mode: Continuous / [ ] Combin
Optimisation of the LiDAR Cloud Generation module
In TPP, the calculation of calibration angles has been optimised and a new algorithm implemented for vehicle-based Mobile Laser Scanning (MLS), enabling data processing without third-party software.
Key improvements:
- Accelerated calculation of calibration angles — LiDAR data processing is now faster due to optimised computational procedures
- New algorithm for vehicle-based MLS — takes into account the specifics of ground-based scanning, improving point cloud accuracy
- Complete autonomy — no additional post-processing in external programmes required


Images 6-7. Comparison of mobile laser scanning data processing before and after the Implementation of the LiDAR Cloud Generation Module
Benefits:
- Reduced workflow time — faster delivery of ready point clouds.
- Resource savings — less expenditure on software and labour-intensive manual stages.
- Increased accuracy — correct consideration of motion and calibration specifics during point cloud generation.
- Streamlined workflow — specialists receive ready data directly in TPP, without intermediate steps.
Video 4.TOPODRONE Post Processing 1.5.2.1 interface – an example of aerial laser scanning data visualisation
The optimisation of the module and the introduction of the new algorithm make TPP a more efficient and autonomous tool for working with mobile laser scanning, ensuring high data quality and reduced processing time.
You can update to TPP version 1.5.2.1 directly within the program interface; there’s no need to download anything separately. If you have any questions, please email [email protected] or contact our technical support chat on Telegram.