




























.png)









Aerial surveying with Topodrone DJI Mavic 2 Pro RTK/PPK

This article describes a process of aerial surveying with a Topodrone DJI Mavic 2 Pro L1/L2 RTK/PPK equipped with a 186-channel L1/L2 GPS/GLONASS GNSS receiver.

A good illustration of that is a real project of a mining site survey with a total area of 180ha. It is located in a rugged terrain with mountain slopes and a huge number of buildings, plants, vehicles at an altitude of 1000 m above the sea level.
A poor mobile coverage and ever-changing terrain make the surveying task even harder to complete.
Due to poor communication the common software like DJI GS Pro, Pix4Dcapture and MapPilot has no use. For this reason, we chose the UgCS tool suite.
This product has convenient tools for professional mission planning and drone control via laptop. It provides fully autonomous functioning mode with no internet connection needed. Moreover, it can obtain flight trajectories based on the custom terrain data.
We have described mission planning in our previous article (see the link at the end of the page). Img.3 presents an example of planned flight routes.

Img. 3 An example of planned flight routes in UgGS.
After the preparation we set to field work. At the point with well-known coordinates we mounted base station and started recording static data.

Img. 4 Base station mounted on a point with known coordinates
Then we performed flights with the Topodrone DJI Mavic 2 Pro L1/L2 RTK/PPK. All field work at the area of more than 180ha took several hours to complete.
We were pleasantly surprised by user friendliness and simplicity of the drone. It has a quite small weight, failsafe software and an awesome high-resolution Hasselblad camera.
Next, we obtained logs from the drone and the base station, performed GNSS measurement post-processing with the TOPOSETTER software. We have provided a detailed description of this process in our previous articles. The TOPOSETTER software allows user to assign accurate coordinates to images, delete redundant images that were taken in a short timespan, compensates an antenna tilt during flight. That makes it the most appropriate tool for this task.
For the photogrammetric data handling we chose the Pix4Dmapper tool suite.
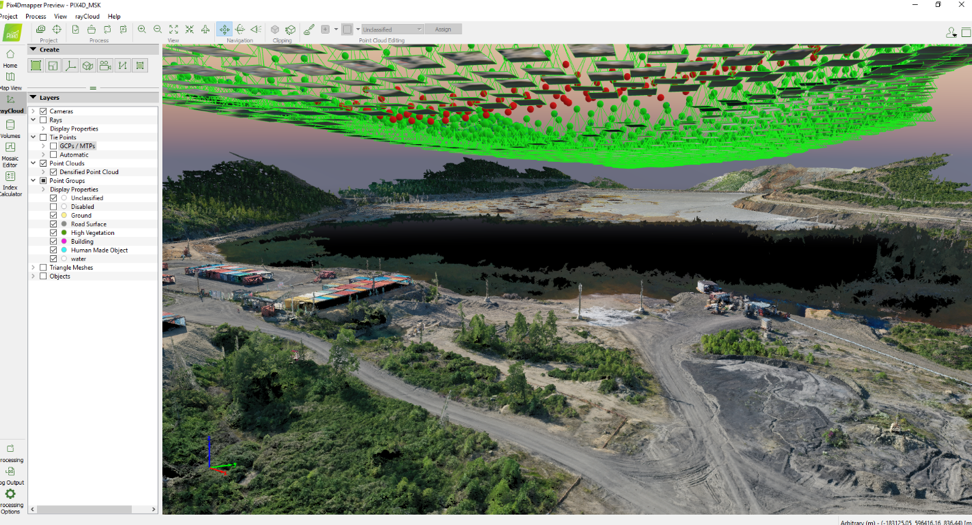
Img. 5: photogrammetric data handling in Pix4Dmapper.
It has the following key features: the ability of high-precision aerial triangulation and rolling shutter distortion compensation, creating a dense point cloud and advanced technologies for its classification.

After uploading images and their high-accuracy coordinates into the project, completing the triangulation step (determining change points, calculating the image inner orientation parameters, compensated distortion after rolling shutter use) we checked the accuracy of image block processing with already known control points.
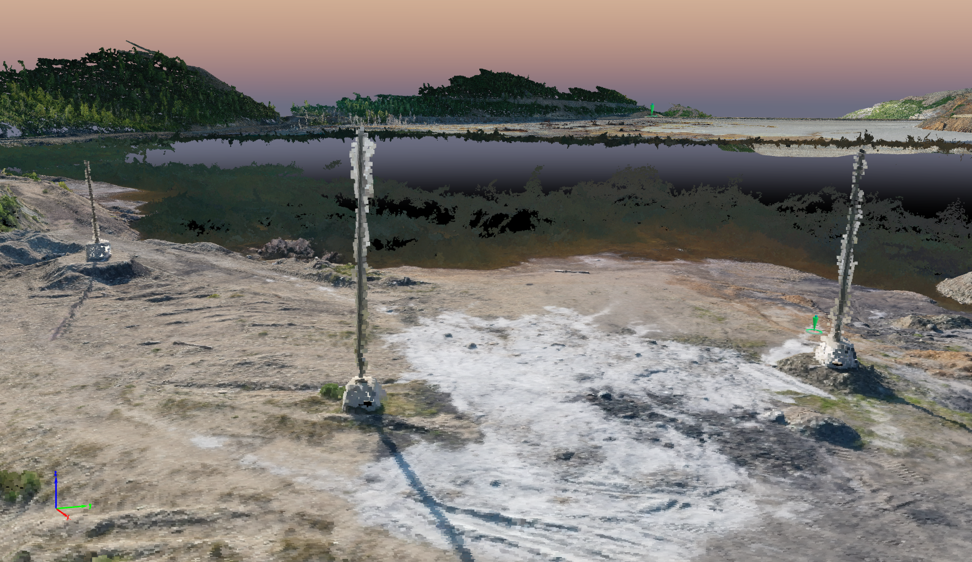
It is safe to say that at the altitude of 90m the point cloud shows light poles, electric lines, barriers, trestles, separate buildings and structures, trees and flora. This point cloud is as detailed as LIDAR scanning results and automatic classification tools allow recognizing objects like roads, flora, buildings, leads and ground. These tools save time and efforts during data processing and minimize hand labor during terrain recognition, getting DTM and contour lines.
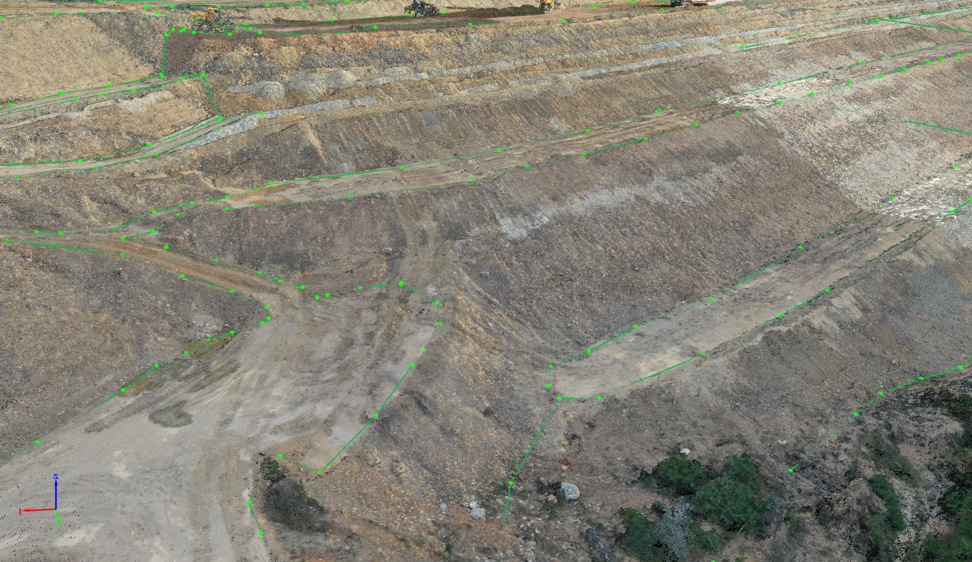
Images 7-18 show the examples of the high-detailed point clouds.

Img 7: Point cloud with barriers, gates, piles, and power lines.
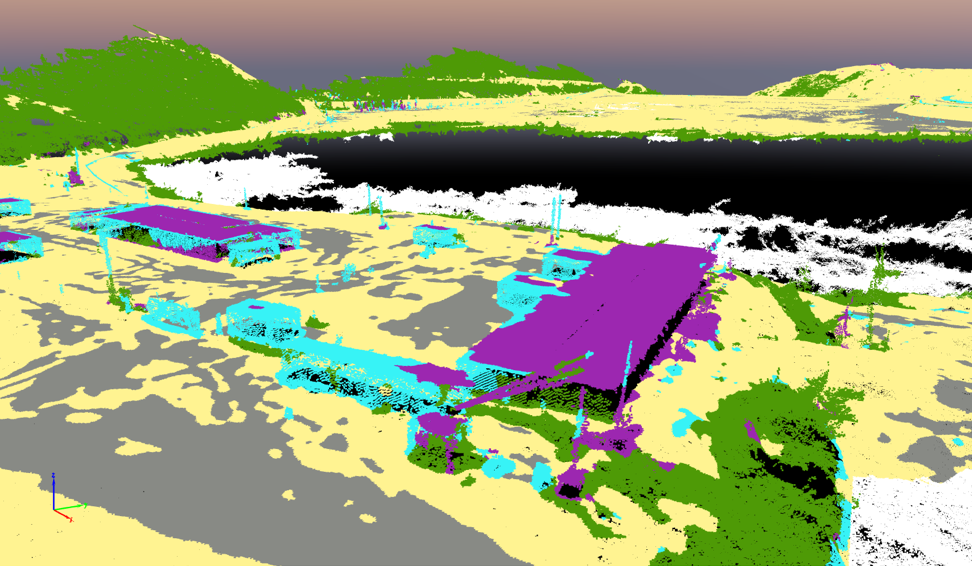
Img 8: Classified point cloud.

Img 9: Point clout with piles, trestles, buildings and vehicles.
Img 10: Classified point cloud.

Img 11: Point cloud with flora, power lines, roads, bases of slopes and brows.

Img 12: Classified point cloud.

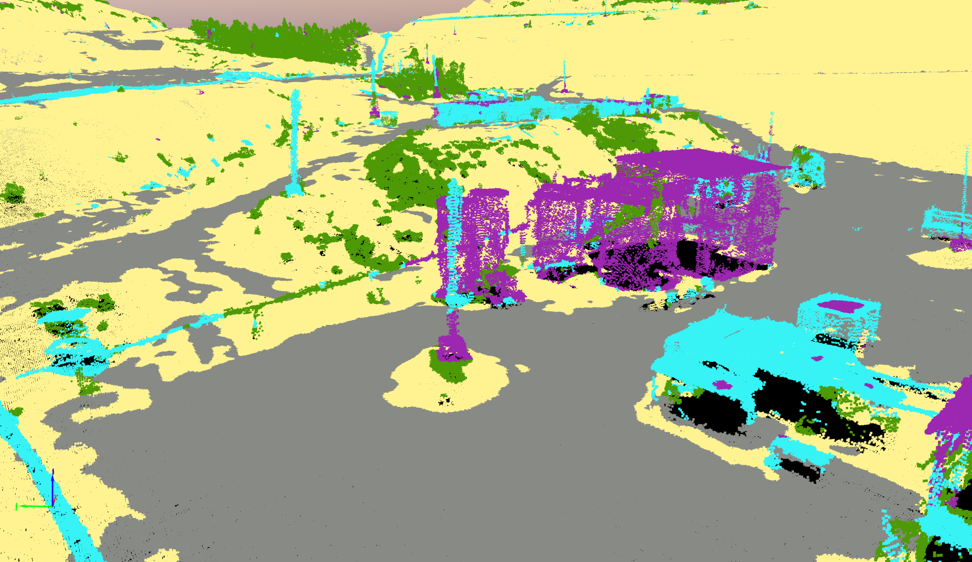
Img 13: Point cloud with warehousing facilities, light guard group and gates.

Img 14: Classified point cloud.

Img 15: Point cloud with dense flora

Img 16: Point cloud with automatically flora

Img 17: Point cloud with tubes and their position above ground.
Img 18: Point cloud with piles on a concrete basement
On the next step we started to prepare the map. Using vectorization tools included into Pix4Dmapper we digitalized roads, brows and bases of slopes, drainage, barriers, constructions and buildings. Digitalizing results are on img 19-21.
Img 19: Pix4Dmapper vectoring tools digitalizing results.

Img 20: Pix4Dmapper vectoring tools digitalizing results.

Img 21: Pix4Dmapper vectoring tools digitalizing results.
After the automatic cloud point classification we created a digital terrain model, contour lines and prepared orthophotomosaic. The result is given on pictures 22 and 23.
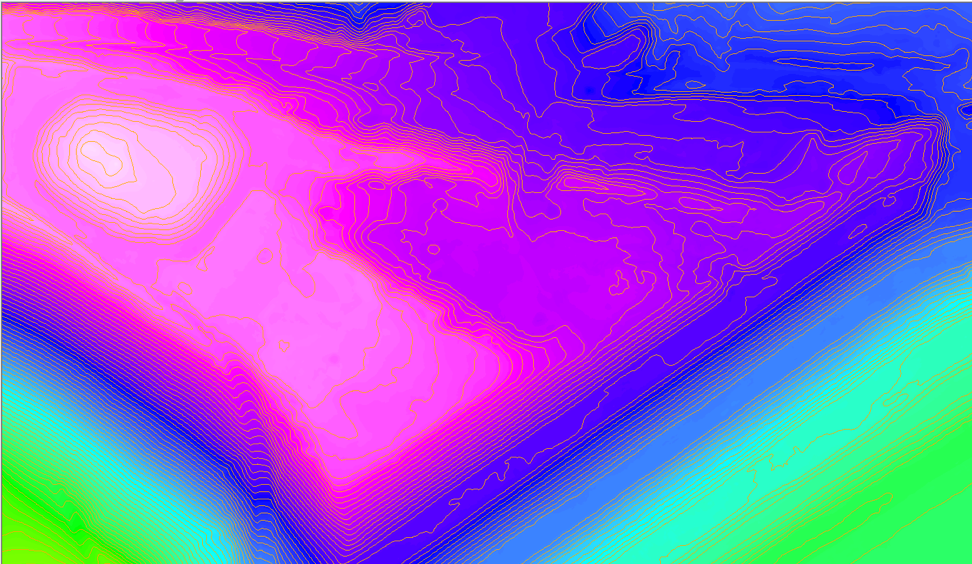
Img 22: The digital terrain and the contour lines model.

Img 23: Orthophotomosaic and the contour lines.
On the final stage we imported vector dataset (contour lines, terrain elements, roads, drainage, barriers, buildings and constructions, power lines, tubes, trestles, etc.) with orthophoto into AutoCAD Map 3D for creating a map layout.
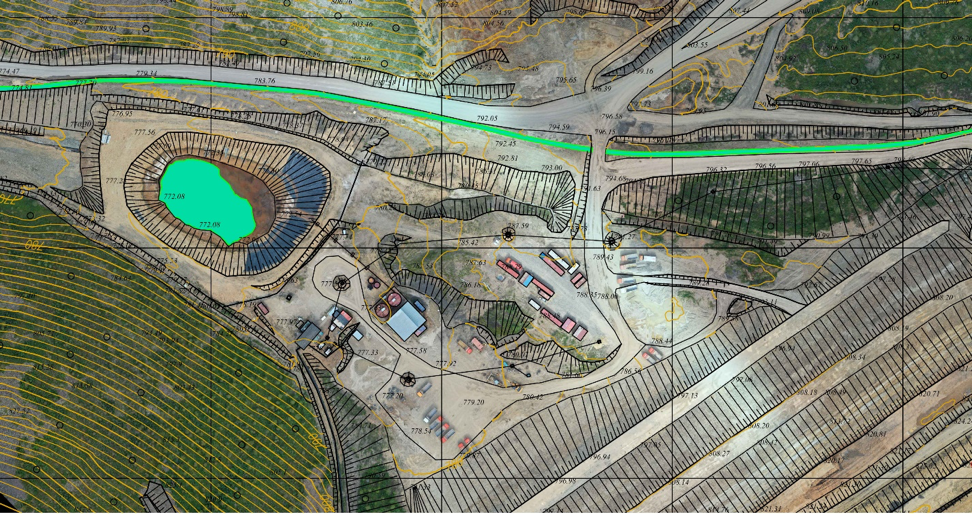
Img 24: Topographic map with orthophotomosaic.

Img 25: Topographic map with orthophotomosaic.
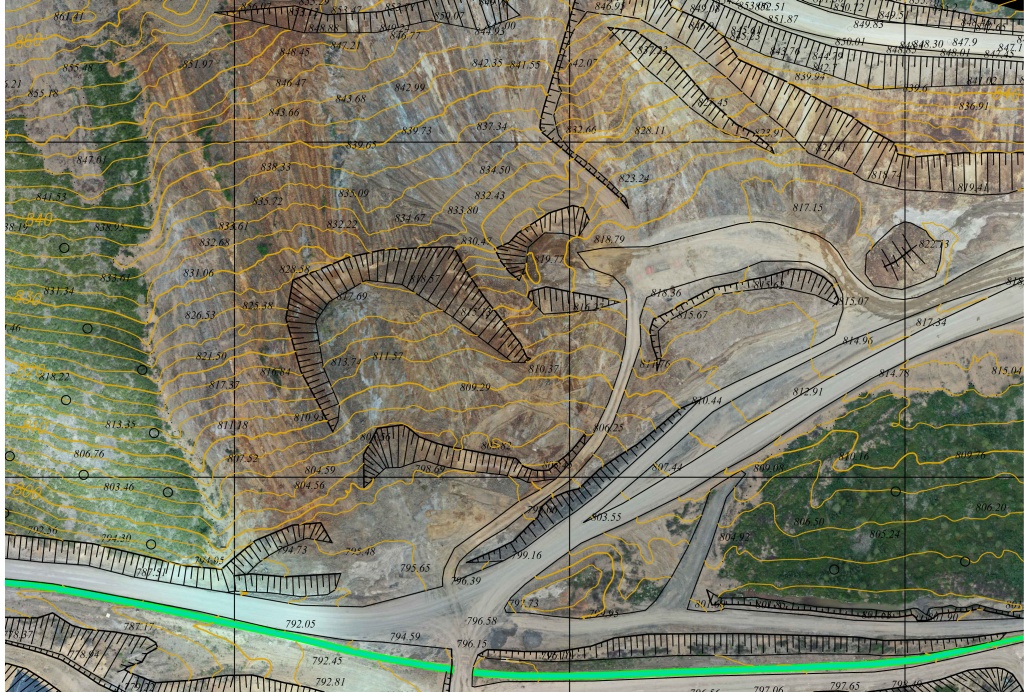
Img 26: Topographic map with orthophotomosaic.
Conclusion
The successful realization of the project shows the potential of using Topodrone DJI Mavic 2 Pro L1/L2 RTK/PPK for surveying. Although the device is the smallest among the survey drones, available at the market, it provides high accuracy for 3D modelling and topographic mapping up to 1:500 scale.
The use of this tool with professional planning and guiding software UgCS guarantees the accomplishment of the mission even in especially harsh conditions.
Pix4Dmapper software provides high-accurate photogrammetric plotting, detailed point cloud generation and its automatic classification. The highest point cloud quality, depicting piles, fences, trestles, buildings and constructions allows creating a topographic plan in office conditions. It saves time and expenses whereas automatic point classification technologies make office work easy and simple.
|
Start cooperation with an individual consultation on the selection of equipment and services.
|
Order service
|