




























.png)









SLAM 200E - THE UPGRADE FOR SLAM 100 HIGH-PRECISION MLS IN REAL-TIME MODE

Table of Contents

Image 1. SLAM 200E Mobile Laser Scanner
General Information about SLAM 200E
The SLAM 200E is a high-precision, high-performance, and efficient handheld laser scanner. The device is equipped with a high-frequency LiDAR sensor, two 12 MP panoramic cameras, an integrated GNSS module, and a powerful computing unit. This configuration provides a fundamentally new level of geospatial data acquisition.
The mobile SLAM 200E scanner is professional equipment designed for mapping tasks in environments without GNSS signal. The scanner delivers relative accuracy of up to 5 mm at distances of up to 60 metres and absolute accuracy of up to 2 cm.
The integrated computing unit allows real-time data processing simultaneously with data collection, mapping, and colour overlay. When a GNSS antenna is connected, it is possible to work with absolute coordinates in real time.
Using the SLAM Instant APP allows for map creation immediately after measurements are completed, including data on points, lines, areas, and volumes. Additionally, for specific industry tasks, the function of generating measurement reports on-site is implemented.
The SLAM 200E is an updated version of the first-generation SLAM 100 laser scanner. The model retains the key features of its predecessor and has gained new capabilities: the ability to resume scanning from a previous session, support for 3DGS, and other functions. These improvements make the SLAM 200E mobile scanner an even more convenient and effective tool for high-precision measurements.
SLAM 200E Scanner Specifications
Main Characteristics
| Weight | - 1.6 kg(Scanner) - 2.1 kg(With battery and base) |
| Dimension | 404 mm x 170mm x 188mm(with battery and base) |
| Power | 26W |
| Storage | 512G SSD |
| Lithium battery | SP30 |
| Lithium battery endurance | 70 min(SLAM200E only) |
| Operating temperature | -20°C ~ 50°C |
| Humidity | <95% |
| IP Grade | IP54 |
Laser
| Wavelength/td> | 905 nm |
| Laser class | Class 1 |
| Range | 0.05-120m |
| FOV | 360°H, 270°V |
| Point frequency | - 320 kpts/s (16 laser lines version) 640 kpts/s (32laser lines version) |
Camera
| Resolution | 12 M pixel * 2 |
| FOV | 210°(Per camera) |
GNSS Module
| Satellite system | GPS | GLONASS | GALILEO | BDS | QZSS |
| Positioning Accuracy (RTK) | Horizontal: 0.8 cm+1ppm Vertical: 1.5 cm+1ppm |
High-Precision IMU
| Bias Instability | 0.5°/h (Allan Variance @25℃) |
| Angle Random Walk (ARW) | 0.025°/√hr |
Interfaces
| Type-C1 | Charge | OTG | 20V external power |
| Type-C2 | SSD |
| Wi-Fi | Supported |
| Bluetooth | Supported |
Post-Processing Accuracy
| Absolutely accuracy (RMSE) | 2cm (Typical) |
| Relative accuracy(RMSE) | Handheld Mode, Control Point-Assisted Mode[1]: 1cm@100m 5mm@60m |
| Repeat accuracy(RMSE) | 2cm(Uninterrupted RTK scans twice) |
| Point cloud thickness | 0.5cm(Point cloud planar thickness within 50 m of the odometry center) |
Real-Time Result Accuracy
| Absolutely accuracy (RMSE) | 3cm |
| Relative accuracy(RMSE) | 2cm@100m |
| Point cloud thickness | 2cm |
[1] Relative accuracy: typical test conditions — area 100 m × 100 m. In RTK mode, relative accuracy depends on RTK data quality and local conditions.
Scanner Components

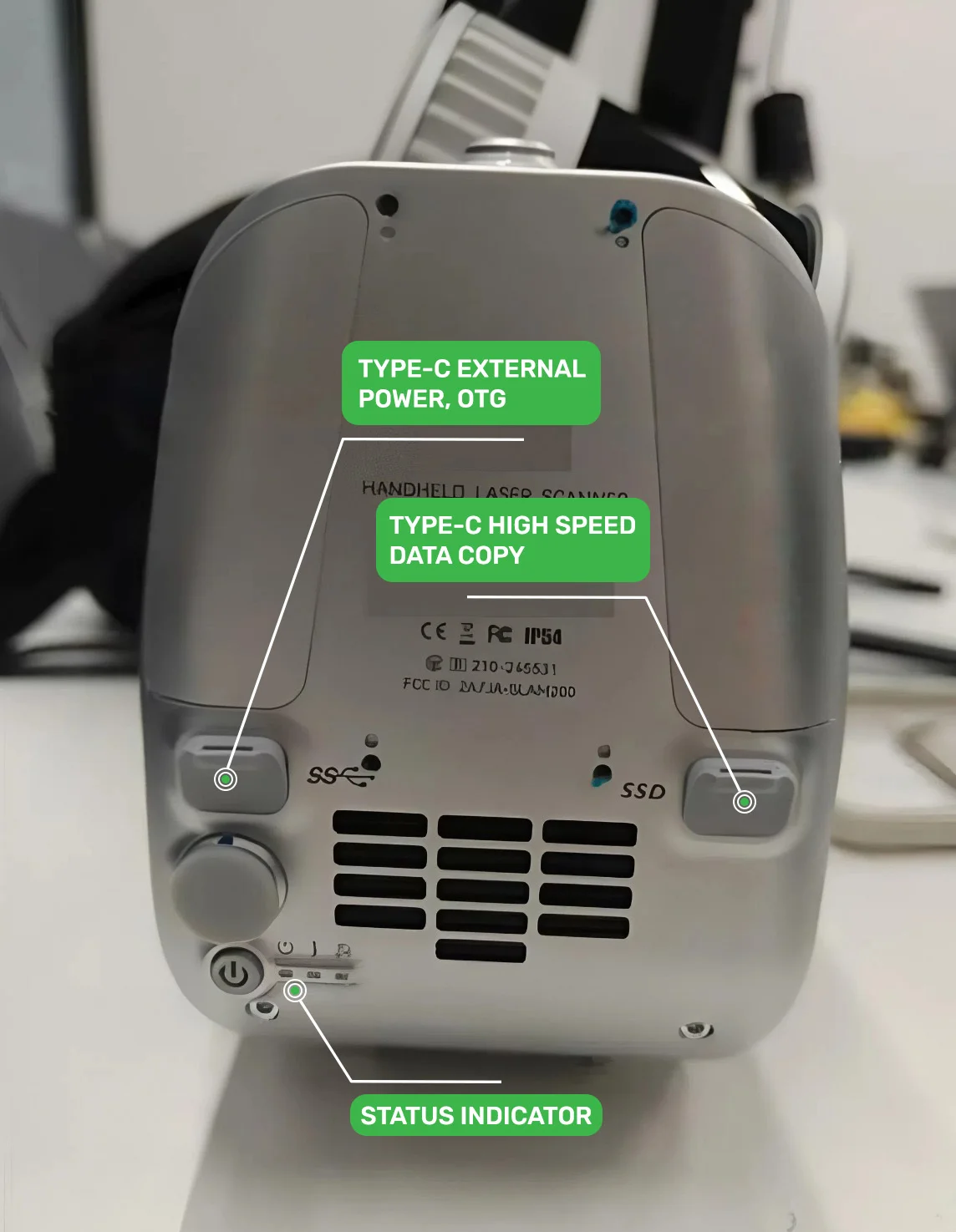
Images 3-4. Main Components of the SLAM 200E Scanner
SLAM 200E Features
4.1. Ultra-High Measurement Accuracy
The SLAM 200E mobile scanner is a geodetic-class high-precision mapping tool. Using this instrument ensures relative accuracy of 5 mm at distances up to 60 metres and 1 cm at distances up to 100 metres. With a GNSS antenna connected or using reference points (GCP), absolute accuracy of up to 2 cm is achieved.
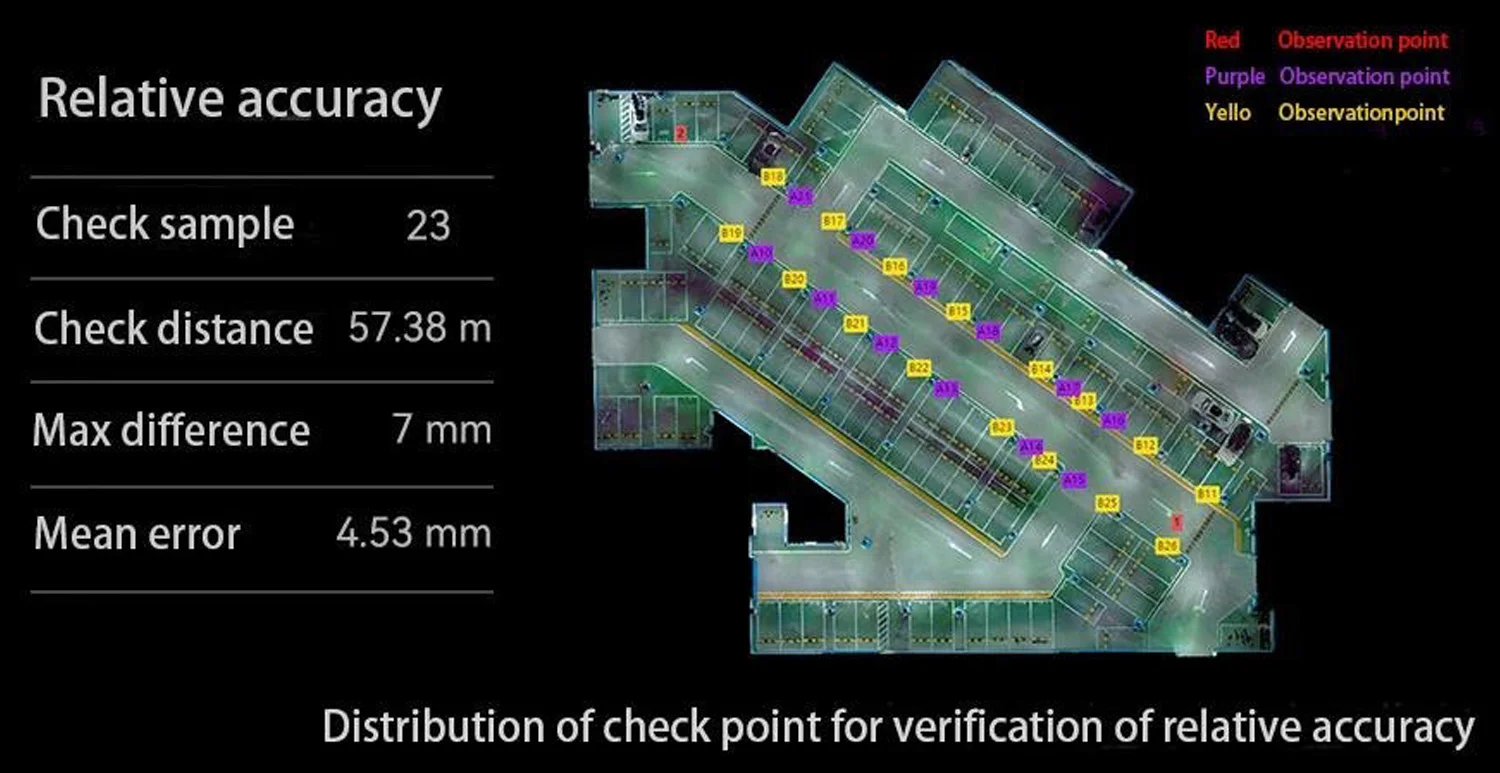
Image 5. Distribution of control points for checking relative accuracy.
4.2. Real-Time Mapping
The SLAM 200E scanner allows near-instantaneous generation of detailed maps and high-precision coloured point clouds. With a GNSS antenna connected, it is possible to generate point clouds in real time with absolute coordinates, significantly increasing work efficiency.
Real-time point cloud collection with rapid subsequent processing allows solving approximately 80% of standard tasks in various fields, including survey work and engineering monitoring.
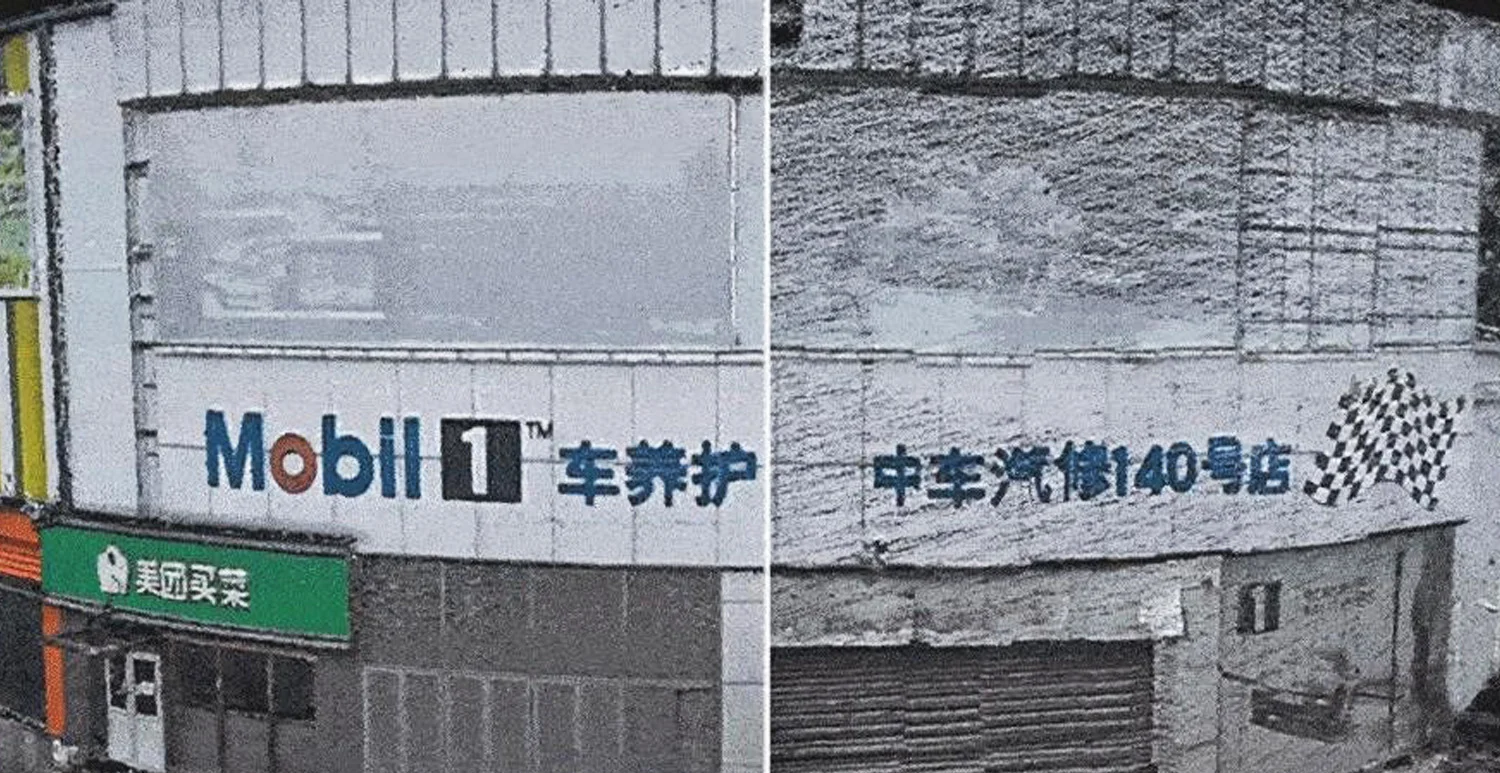
Image 6. Comparison of data accuracy with and without GNSS antenna.
4.3. 3D Map Reconstruction
SLAM 200E allows obtaining detailed point clouds with high-resolution textures, ensuring accurate 3D map creation based on geometry and imagery. This approach makes the system an optimal solution for BIM modelling and other projects requiring high-quality 3D data.

Image 7. 3D Reconstruction of a Landscape Area.
4.4. Panoramic Camera
SLAM 200E is equipped with two 12 MP panoramic cameras, providing a 360° field of view and detailed texture capture. This method allows realistic coloured point clouds and panoramic images. Panoramic data can be used for point cloud colouring, visual SLAM, panorama generation, 3D reconstruction, 3DGS, and other tasks.

Image 8. Example of panoramic capture.
Key Features of the SLAM 200E Scanner
5.1. Rapid Point Cloud Generation
Typically, converting raw point cloud data into final results requires specialised post-processing software, skilled personnel, additional office work, and significant time.
The SLAM 200E scanner is supplied with the SLAM Instant APP, enabling near-instant 3D reconstructions in various conditions. After data collection, specialists can generate ready industry reports in the field within minutes.
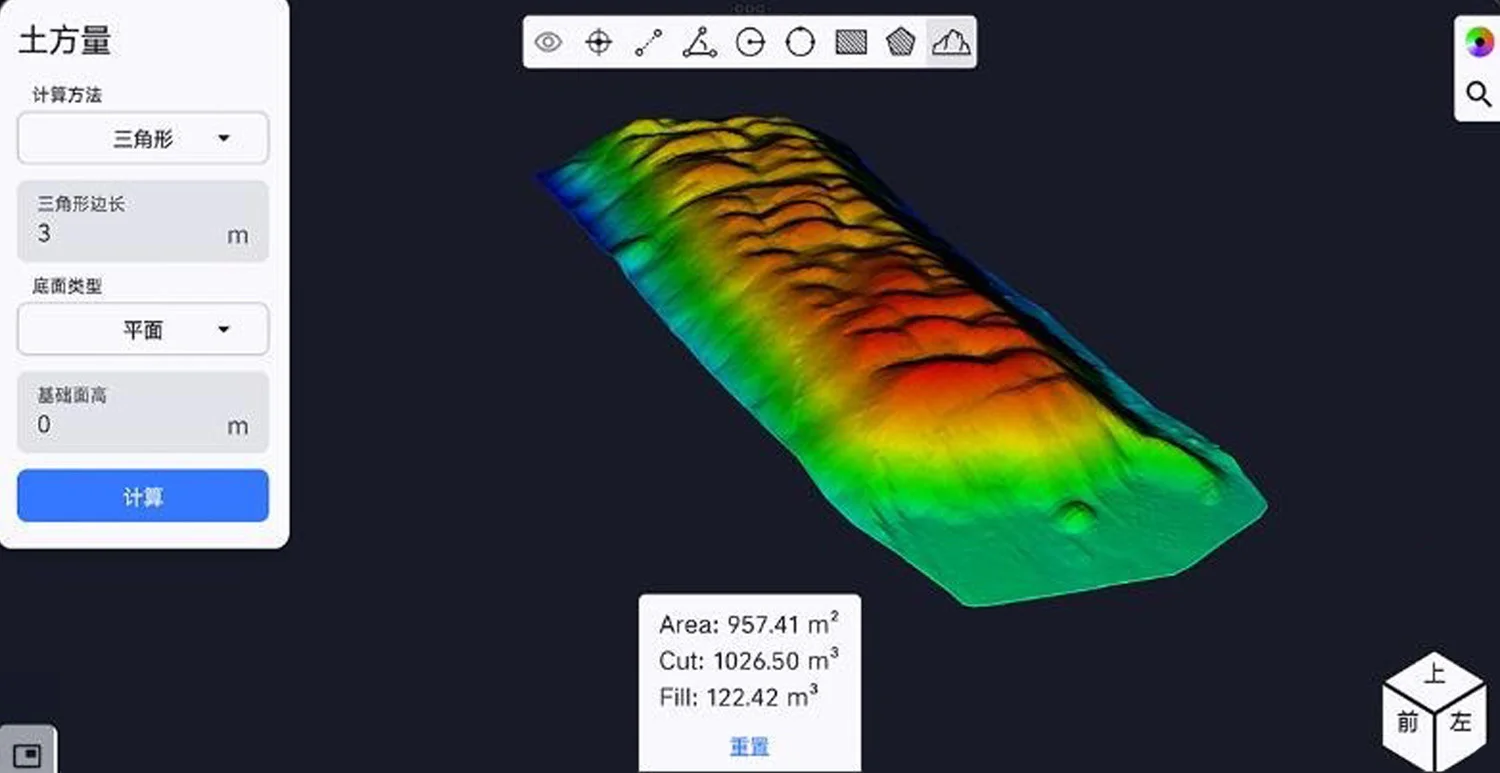
Image 9. Example of Using the SLAM Instant App – DEM Generation.
5.2. 3D Gaussian Splatting (3DGS)
Using panoramic images, the SLAM 200E supports generation, visualisation, and utilisation of large-scale models with 3D Gaussian Splatting technology. Results and intermediate data are saved in open universal formats, enabling easy integration with third-party platforms. The 3D Gaussian Splatting feature is implemented in the handheld scanner and is provided free of charge for the device's lifetime.

Image 11. Example of Creating a Realistic 3D Model.
5.3. Static Scanning Mode
Static scanning mode allows obtaining accurate, detailed, and dense point clouds in complex conditions. Additionally, data collection at a defined field of view with automatic registration and optimisation of static station data is supported, further improving data quality and processing efficiency.
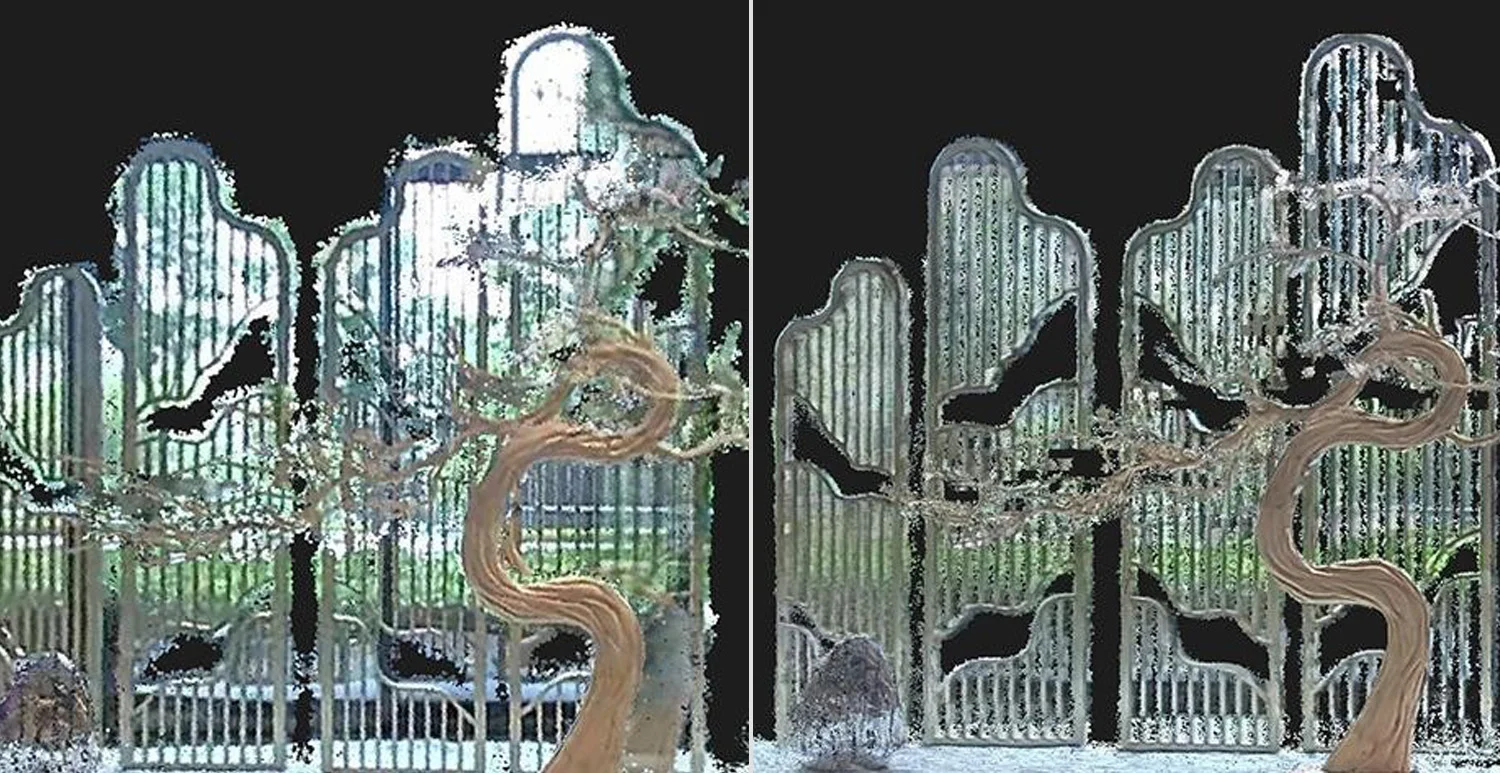
Image 12. Comparison of Data Collected in Motion and Data After Adding Static Scanning Results.
5.4. Remote Data Transmission
During real-time scanning and mapping—particularly in mining, emergency response, and similar scenarios—the SLAM 200E handheld scanner can transmit mapping results directly to an operations centre via local network or the internet. This approach reduces data consolidation time and accelerates decision-making.
Direct Internet Transmission: a mobile device connects to the SLAM 200E scanner, maintaining an active connection during operation and transmitting data in real time via the internet. This provides instant remote access to information from a PC.
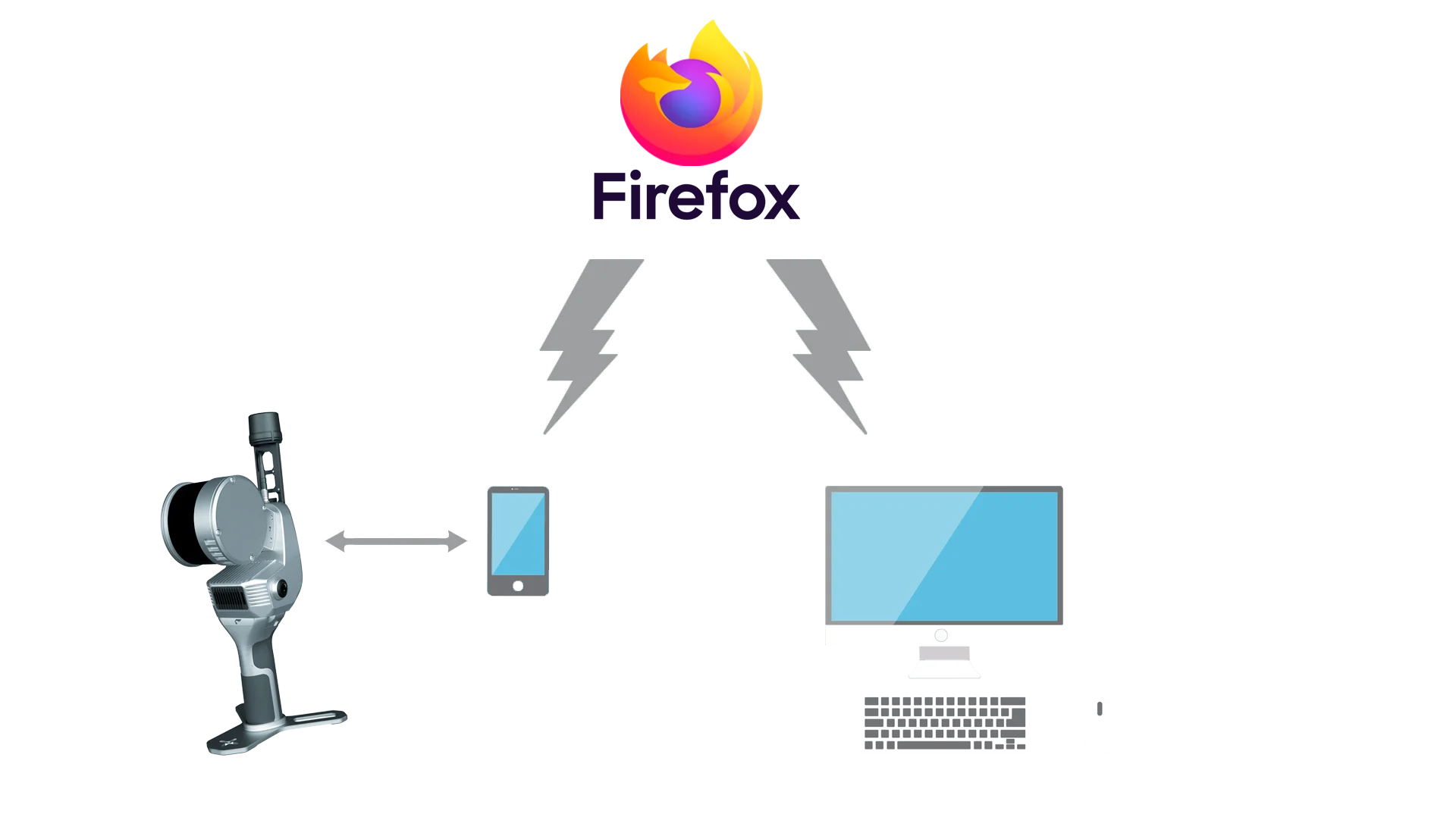
Image 13. Data Transmission via Internet Using a Mobile Phone/Tablet.
Local Network (LAN) Transmission: Data is transmitted via LAN when the scanner and remote PC are connected to the same local network, without using the public internet.
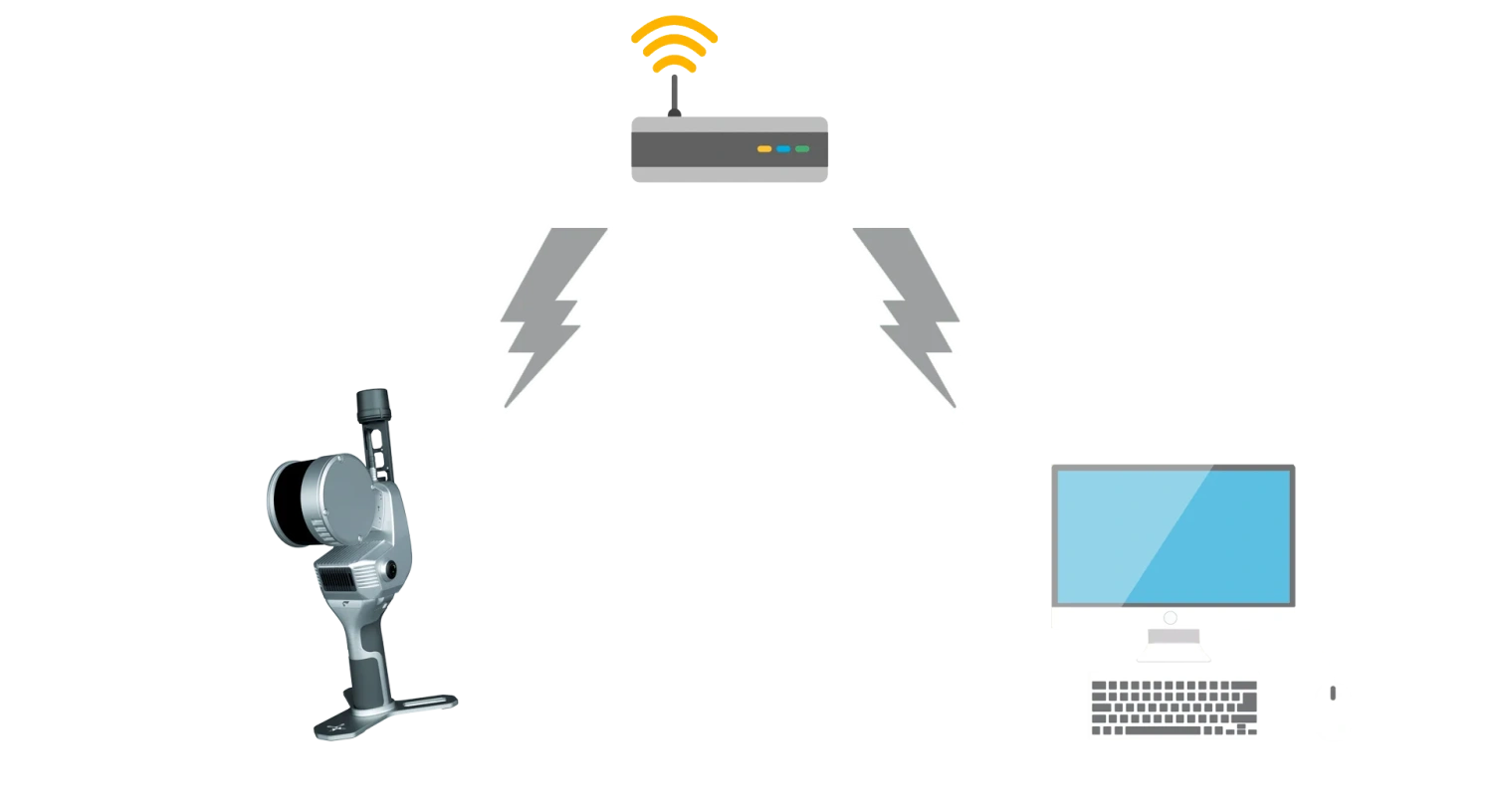
Image 14. General Scheme of Data Transmission via Local Area Network.
LAN Data Relay: an additional option for LAN mode. The handheld scanner connects to the local network. Remote PC A relays/exchanges data, and remote PC B in the same network receives real-time data using a relay code.

Image 15. General Scheme of Data Relay.
5.5. Multi-Platform Support
SLAM 200E supports a modular, cross-platform, and multi-task workflow, easily adaptable for installation on backpacks, vehicle mounts, chest mounts, or tripods.





Images 16-20. Mounting Options for the SLAM 200E.
SOFTWARE
6.1. SLAM GO App
SLAM GO is a handheld laser scanner data collection app compatible with Android and iOS. The app provides stable connection to the SLAM 200E via Wi-Fi or, if necessary, mobile network. SLAM GO offers convenient device and project management, as well as robust data collection and processing functionality.
Functions:
- Device and settings management;
- Project management;
- Real-time mapping, data viewing, and navigation;
- CORS system setup and connection;
- Real-time mapping data streaming via the internet, and more.
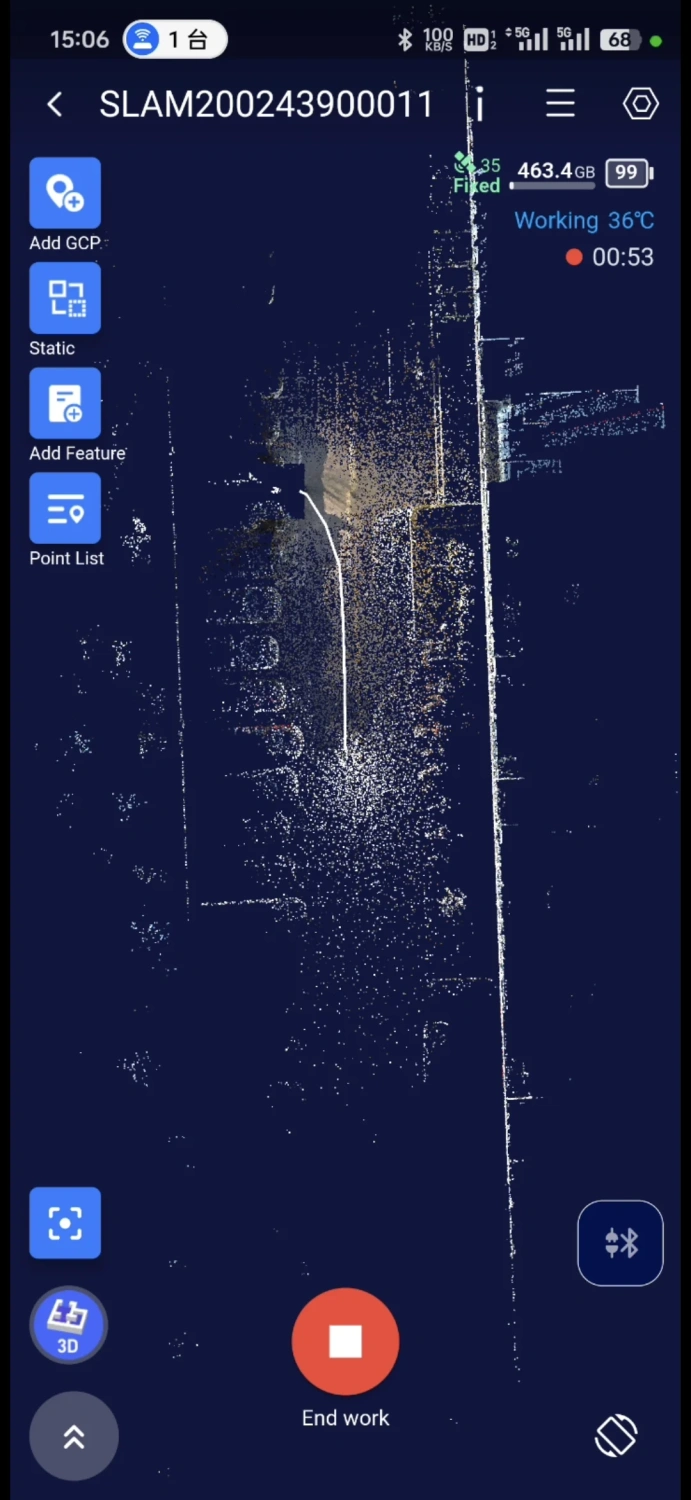
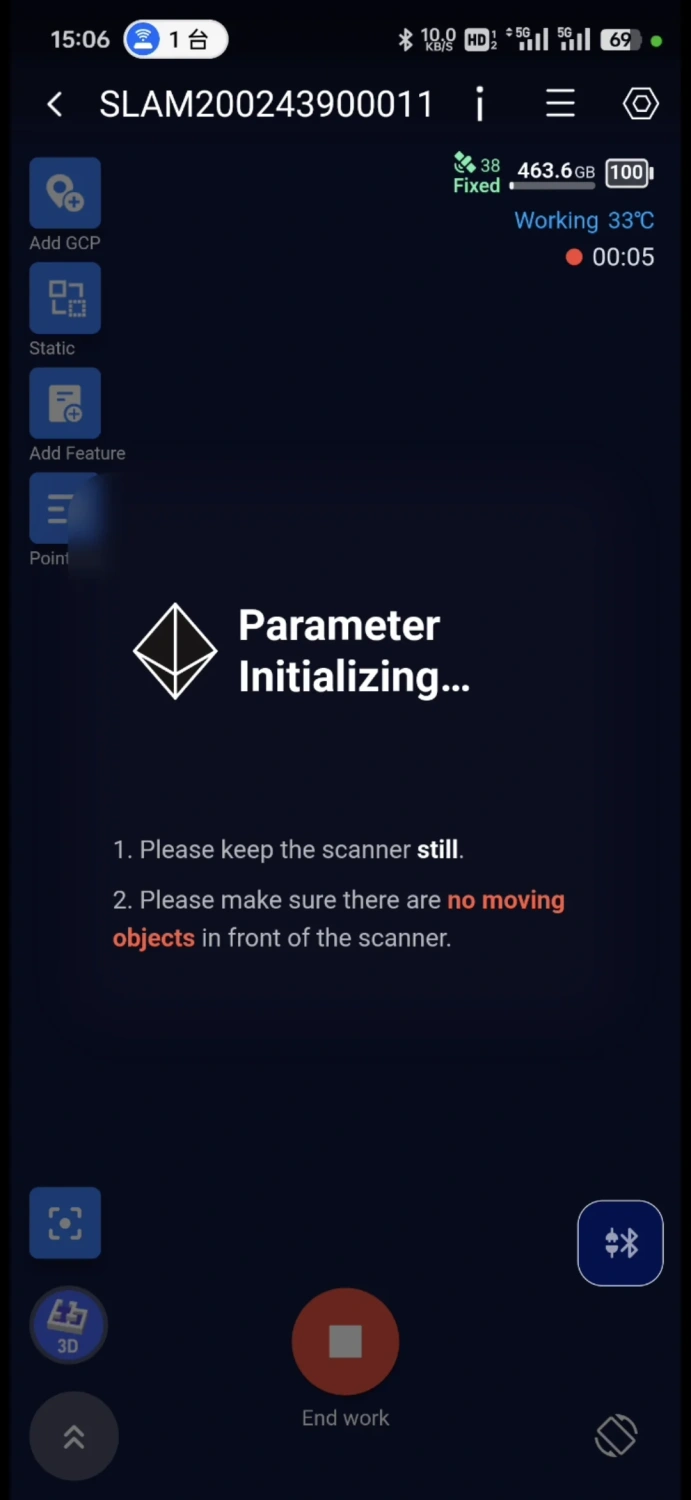
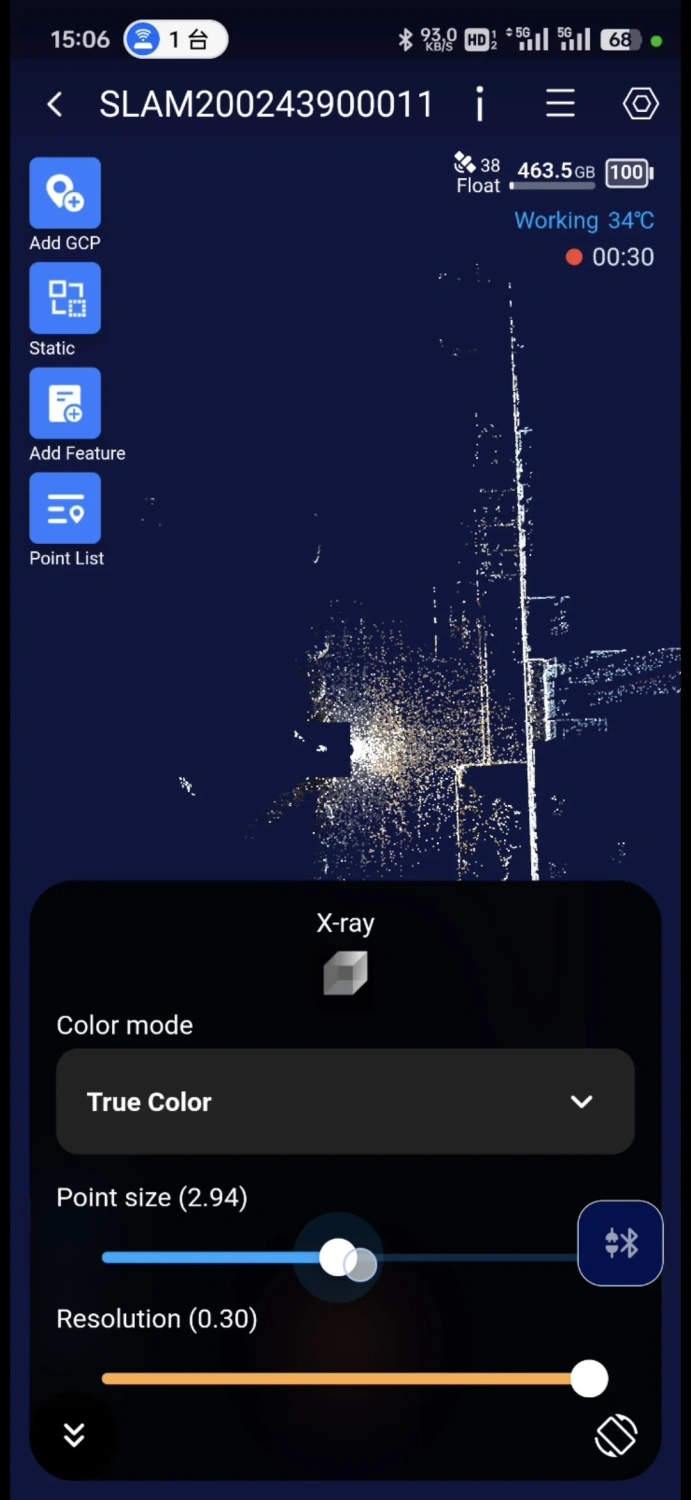
Images 21-23. SLAM Instant App Interface and Point Clouds.
6.2. SLAM GO POST Pro
SLAM GO POST Pro is PC software supplied with handheld laser scanners and integrated into the UAV manager. The software supports post-processing of SLAM 200E data, enabling creation of high-precision, high-resolution coloured point clouds and localised panoramic images. It also provides point cloud visualisation and optimisation.
Key functions:
- Handheld laser scanner data processing;
- Point cloud array display and viewing;
- Point cloud colouring, panoramic image generation, and 3DGS;
- Continuation of scanning from break points.

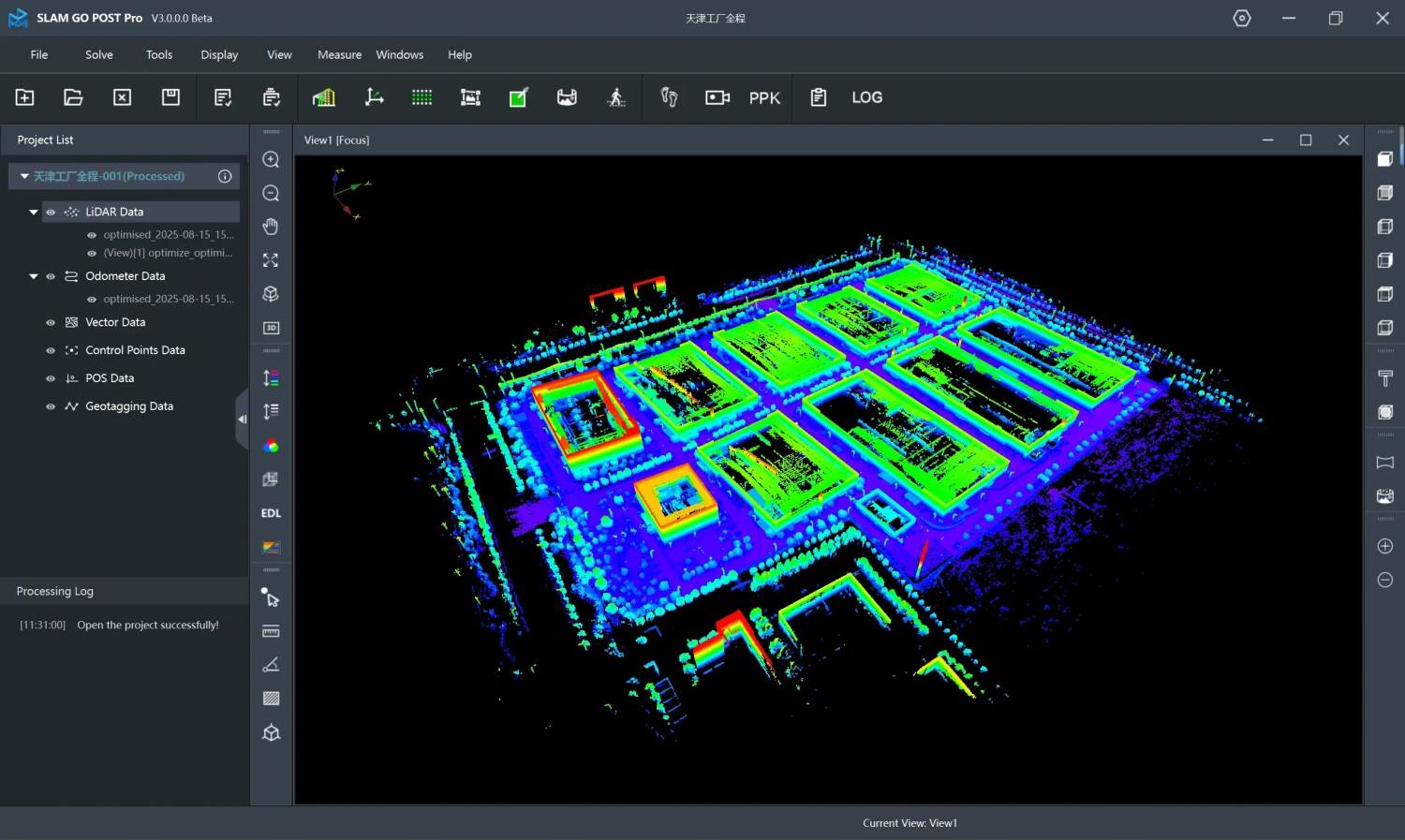
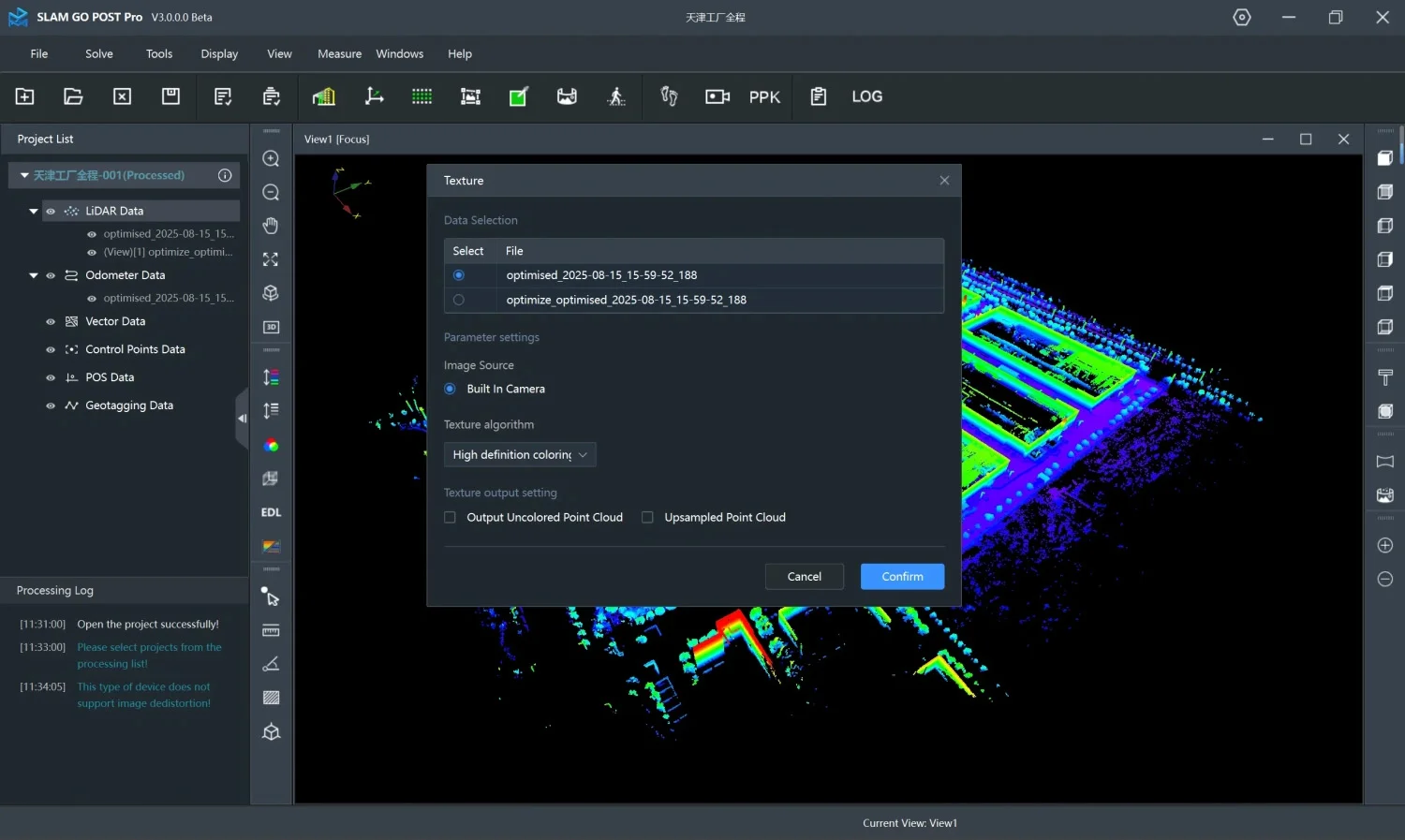
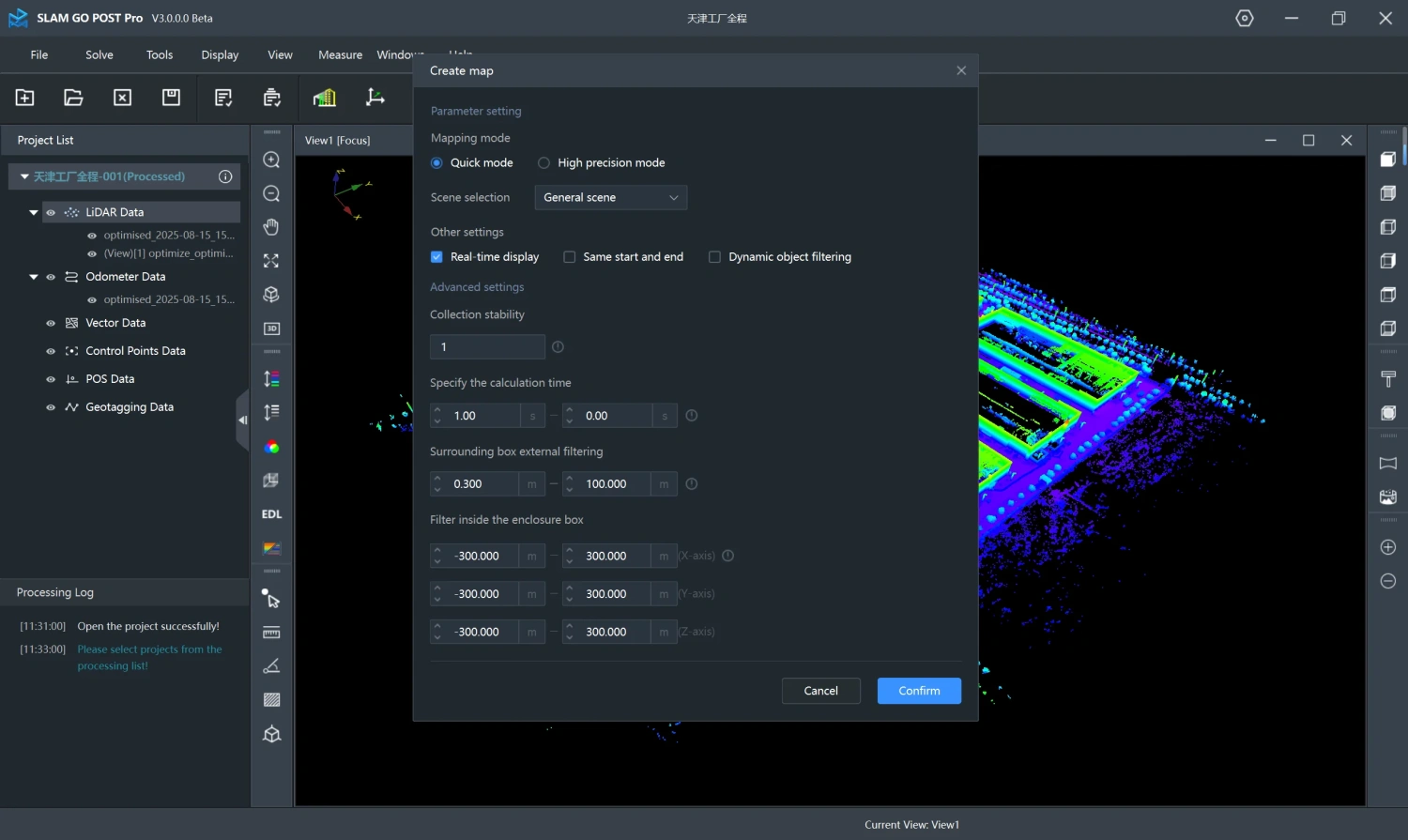
Images 24-26. Example of the SLAM GO POST Pro Interface.
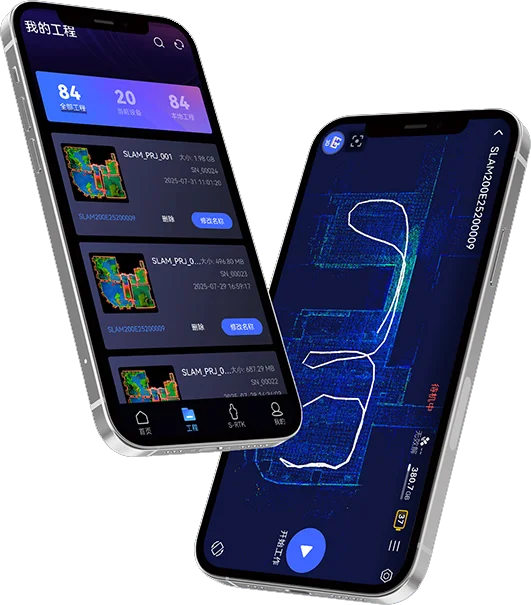
6.3. SLAM Instant App
SLAM Instant App is a specialised app for real-time field measurements.
Installed on an Android phone or tablet, it allows rapid measurements and generates industry reports after data collection.
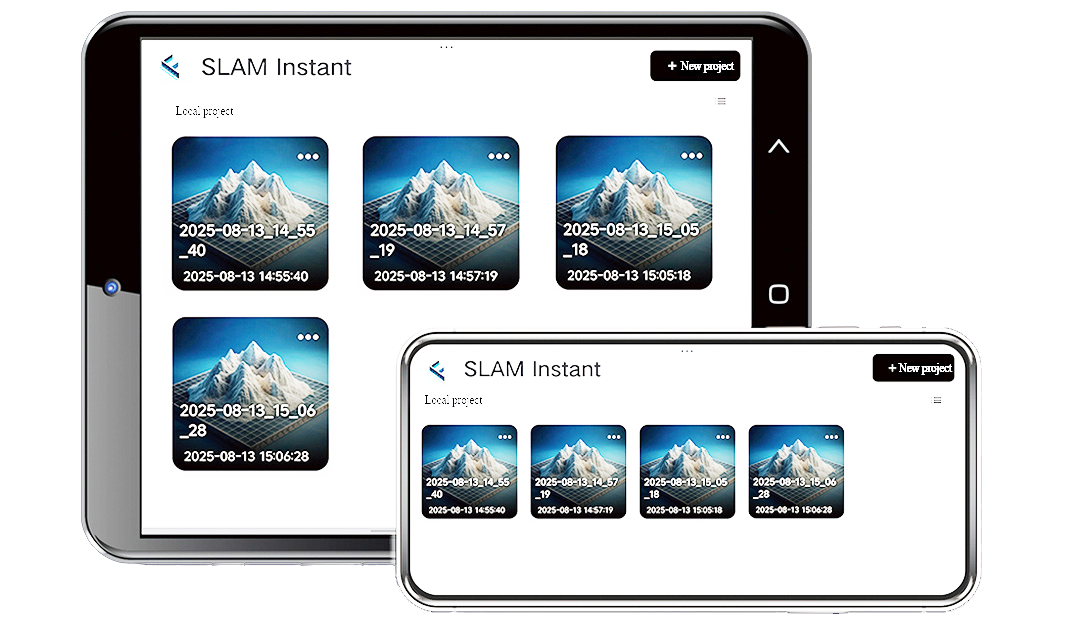

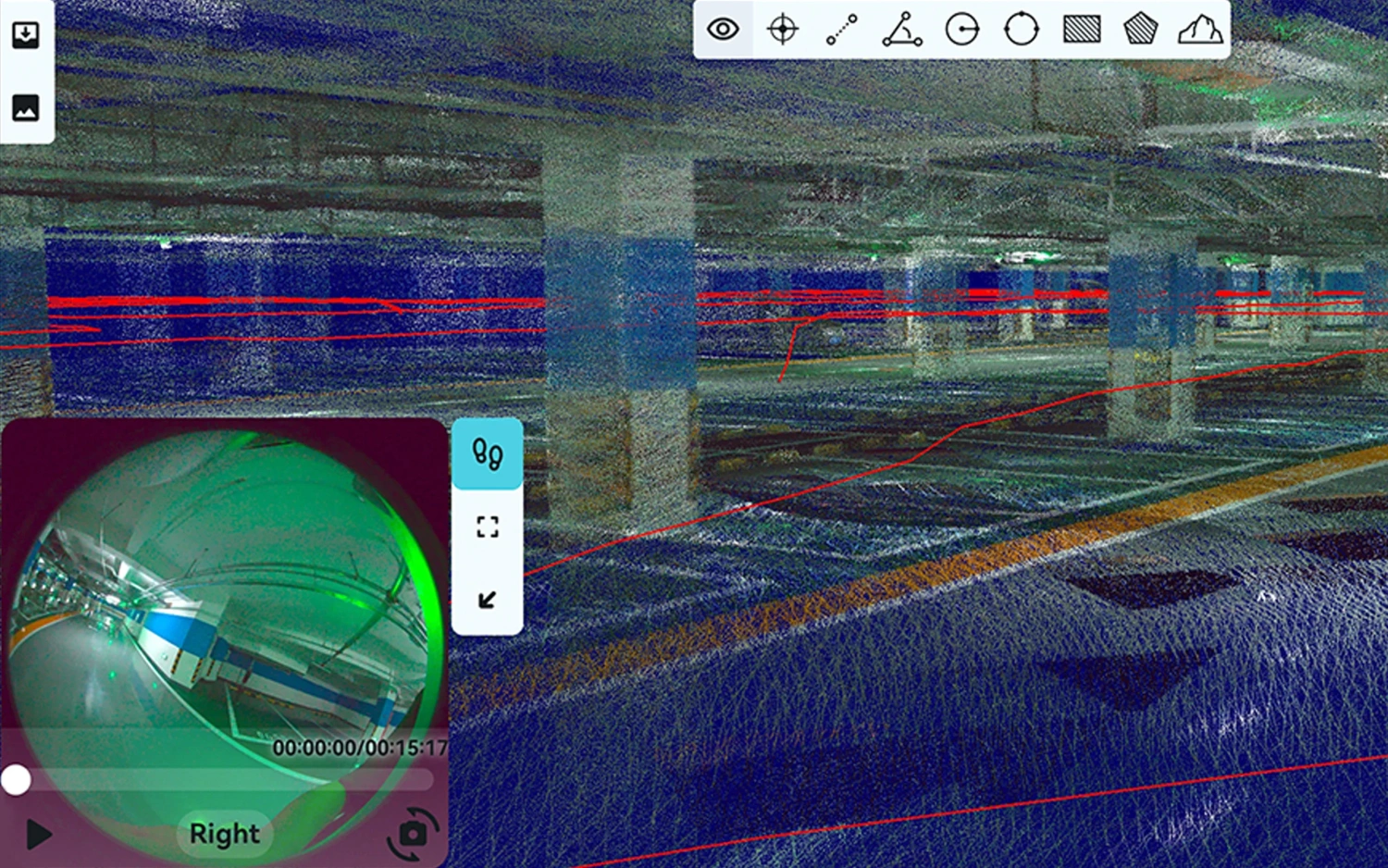
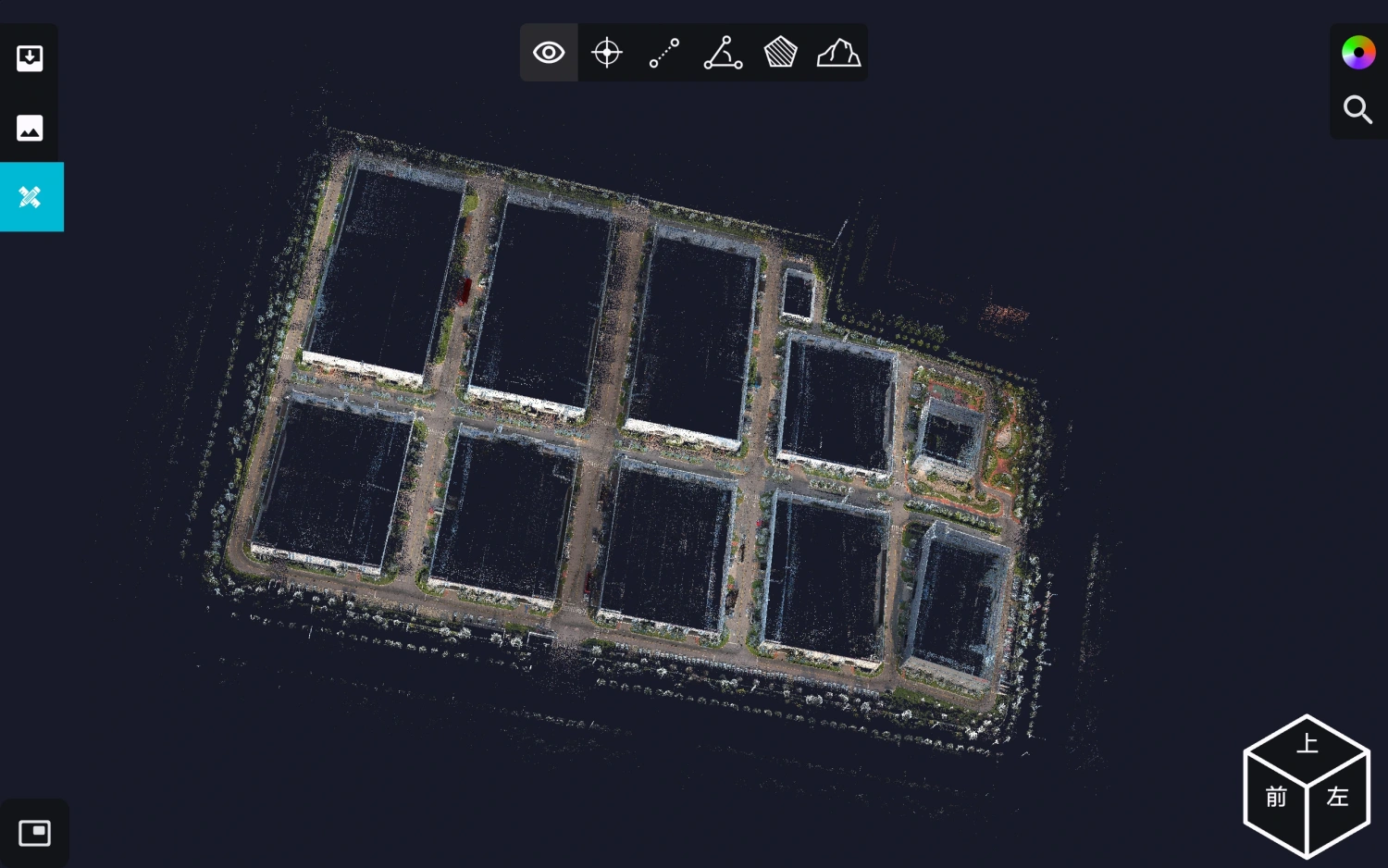
Images 27-29. SLAM Instant App Interface and Point Clouds.
Currently, the SLAM Instant App is in internal testing and will be available shortly.
Conclusion
The handheld SLAM 200E scanner is an efficient and technologically advanced solution for 3D mapping tasks in environments without a GNSS signal. Its combination of high measurement accuracy, real-time operation capability, and support for modern technologies such as 3D Gaussian Splatting allows this equipment to be used for a wide range of applications.
The key advantages of the model are the rapid acquisition of results, a variety of operating modes, and cross-platform compatibility. All of this makes the scanner a practical tool for surveying, construction, mining, and other industries.
To order the SLAM 200E scanner or for additional technical information, call us at +41215880211 or send a request to [email protected]. Our specialists will contact you and answer any questions you may have.