




























.png)









MLS EFFICIENCY FOR GEODETIC TREE-BY-TREE SURVEYING WITH SLAM 200


Image 1. Mobile laser scanner SLAM 200
Geodetic Tree-by-Tree Surveying
Tree-by-tree surveying is a topographic survey method that involves determining the precise location, dimensions, and other attributes of individual trees within a specified area. This method is particularly relevant in forestry and land management, where it is crucial to account for existing woody vegetation—be it for landscaping, redevelopment, construction on greenfield sites, or landscape architecture. In such scenarios, technologies enabling rapid, accurate, and low-impact surveying of trees are of critical importance.
The primary objective of a tree-by-tree survey is to obtain detailed information on the condition and structure of a forested area, to estimate timber volume, and to support forest management planning. During the survey, each tree is measured and described in terms of species, trunk diameter at a defined height, total height, and other relevant characteristics.

Image 2. Geodetic tree-by-tree survey with SLAM 200: general view of the site
The geodetic component of a tree-by-tree survey implies the application of geodetic methods and instruments to georeference tree positions within a common coordinate system.
This enables the creation of a precise and detailed site map, essential for forest resource management, logging planning, assessment of damage from natural disasters, and various other applications.
In summary, the SLAM scanner can be employed for multiple types of forest inventory and tree surveying tasks, including:
- Forest resource inventory;
- Assessment of tree and stand condition;
- Determination of species composition;
- Timber quality evaluation;
- Forestry operations planning;
- Landscape design;
- Urban greening and landscaping.

Image 3. 3D reconstruction of the site based on the results of geodetic tree-by-tree survey in natural colors
Employing the SLAM scanner for forest inventory offers several advantages over traditional surveying techniques:
- High accuracy and reliability of collected data
- Rapid data acquisition
- Capability to capture 3D data on trees and vegetation
- Cost-efficiency and reduction of labour intensity
Practical Experience with the SLAM 200 in Tree-by-Tree Surveying
Recently, the TOPODRONE team carried out a tree-by-tree survey of a 1-hectare area using the SLAM 200 scanner. The purpose was to facilitate the future landscaping of the area and optimise site planning to preserve healthy trees. The collected geospatial data will also be used during the development of construction design documentation.
Tree Surveying with Mobile Laser Scanning (MLS)
Unlike conventional methods, mobile laser scanning significantly reduces fieldwork time. The SLAM 200 scanner ensures rapid and precise data collection even in dense vegetation, uneven terrain, or areas lacking GNSS signal coverage.
The scanning process produces a dense point cloud in real time, enabling accurate determination of tree location, height, diameter, species, as well as spatial distribution and density. The resulting data can be further processed using the software suite included with the SLAM 200, specifically within the SLAM GO POST module.
Moreover, the mobility of the system allows for handheld surveying or deployment via a specially designed backpack, vehicle, or other platforms—making the method adaptable for use in both urban parks and remote forested areas.
Why Choose the SLAM 200 for Tree Surveying?
The SLAM 200 is based on the Hesai XT32M2X sensor, which offers a working range of up to 200 metres and a scanning rate of up to 640,000 points per second.
Thanks to the high point cloud density, the scanner can capture not only the presence of individual trees but also assess their height, diameter, species, and precise geolocation.
The scanner is equipped with built-in modules for visual SLAM (two 12 MP cameras) and GNSS RTK, ensuring high-accuracy mapping even in environments with limited sky visibility.
The SLAM 200 can be used in various configurations:
- Handheld operation,
- Mounted on a vest or backpack,
- Vehicle-mounted (car, ATV, or other platforms).

Image 4. Mobile laser scanner SLAM 200
This flexibility allows the survey methodology to be tailored to specific tasks—ranging from small parcels to extensive areas with complex terrain.
Key specifications of the SLAM 200:- Horizontal (planimetric) accuracy: ±2–3 cm (with RTK)
- Vertical accuracy (DGH): ±1.5 cm
- Tree height measurement error: up to 5%
- Minimum detectable tree diameter: from 3 cm
A notable advantage of SLAM technology is its ease of use and speed of data availability. After fieldwork, one may work directly with real-time generated point clouds or process the data further in SLAM GO POST.
Field survey stage

Image 5. Stage of fieldwork – scanning the site with the SLAM 200
Fieldwork was conducted with stringent requirements for data quality and accuracy, ensuring high detail and uniform coverage of the area. Scanning was performed from a height of 1.4–1.6 metres, an optimal range for capturing both tree trunks and understory structure.
The operator's movement followed a uniform trajectory with approximately 15-metre spacing between passes. This ensured an average point cloud density of at least 4,000 points per square metre. The operator moved at speeds of up to 1.5 m/s, achieving a balance between data acquisition speed and survey quality. The entire 1-hectare plot was surveyed in just 15 minutes under clear weather conditions with good visibility and no precipitation.

Image 6. Spot-checking trunk diameters to assess accuracy
Data Processing Stage
Post-processing was performed using SLAM GO POST software. The entire workflow is highly automated, allowing for the delivery of final materials on the same day as data collection. Accuracy assessment was performed using control points. Tree diameter validation was carried out via sample field measurements. Tree positioning and diameter estimation were performed in LiDAR360 using the TLS Forest module.

Image 7. Point cloud of the scanned forest area in natural colours
Main Processing Steps:
- Point cloud generation
- Georeferencing using RTK data
- Noise filtering
- Classification: trees, structures, terrain
- Colourisation using panoramic camera data

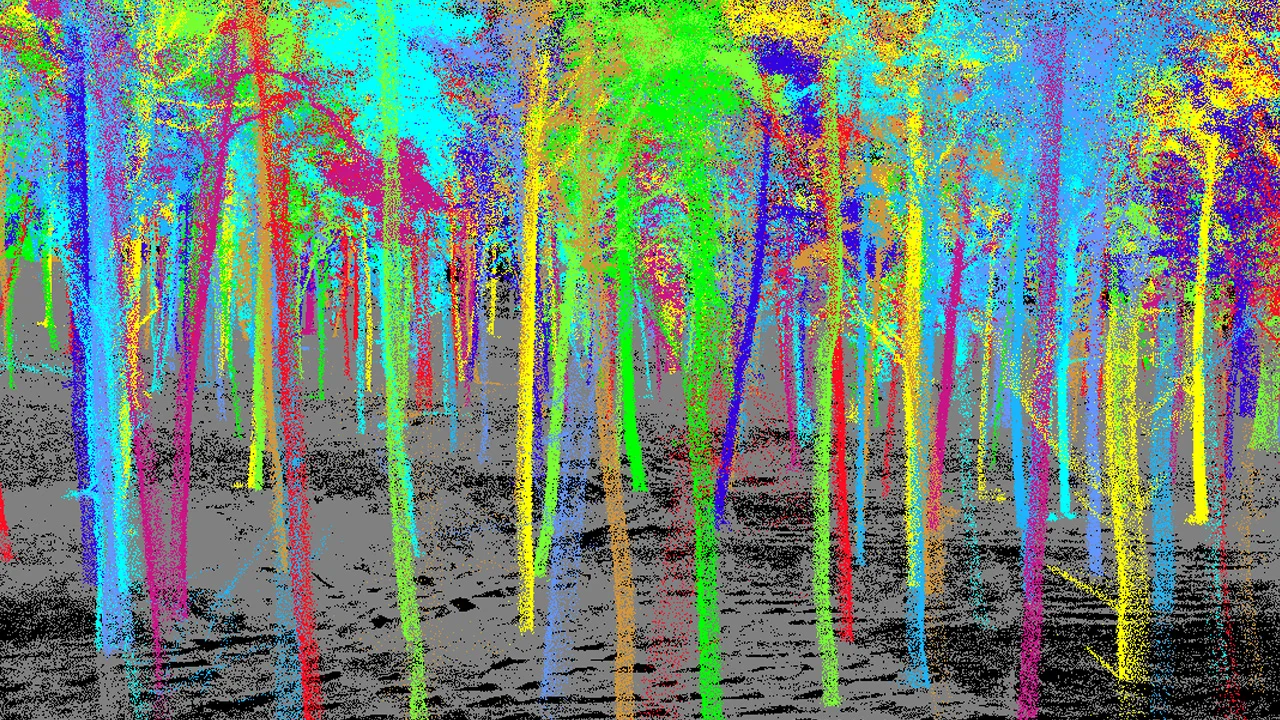
Images 8-9. Tree classification
This was followed by automated tree extraction with computation of coordinates (X, Y), diameter at 1.3 m (DGH), height, and health assessment. Tree species were identified through visual interpretation. Based on the data, a tree inventory list was compiled in Excel/CSV format.
Final deliverables:- Point cloud: LAS format
- Topographic plan at scale 1:200: DWG
- Tree inventory list: Excel/CSV with coordinates, species, diameter, height, and condition
Video 1. 3D visualisation of the surveyed route
Conclusion
The use of the SLAM 200 optimises the tree-by-tree surveying process, offering accuracy comparable to traditional methods while substantially reducing labour input and project completion time.